

●トンボ班の取り組み
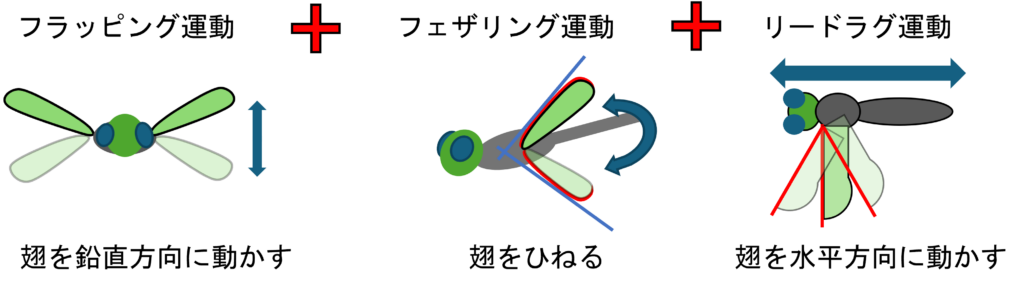
トンボは、翅を鉛直方向に動かすフラッピング運動、翅をひねるフェザリング運動、翅を水平方向に動かすリードラグ運動の3種類の運動を駆使して飛翔しています。また、トンボは、40~90 mm程度の大きさにもかかわらず、7,100 kmにもわたるインド洋を横断できる種類が存在するなど、エネルギー効率が非常に高いことが知られています。さらに、ホバリングや垂直離陸、急発進、急停止などが可能で、自由な方向に飛翔ができるなど、飛翔生物の中でも屈指の運動性能を有しています。トンボ班では、これらの特性に着目し、災害時の安否確認や周辺状況の調査手段としてトンボの羽ばたき運動を模倣したトンボ型のMAV(Micro Air Vehicle)という小型の飛翔ロボットの開発を目指しています。それに向けて、3種類の運動がどのように飛翔に影響しているか検証しています。
●トンボ型MAVの製作
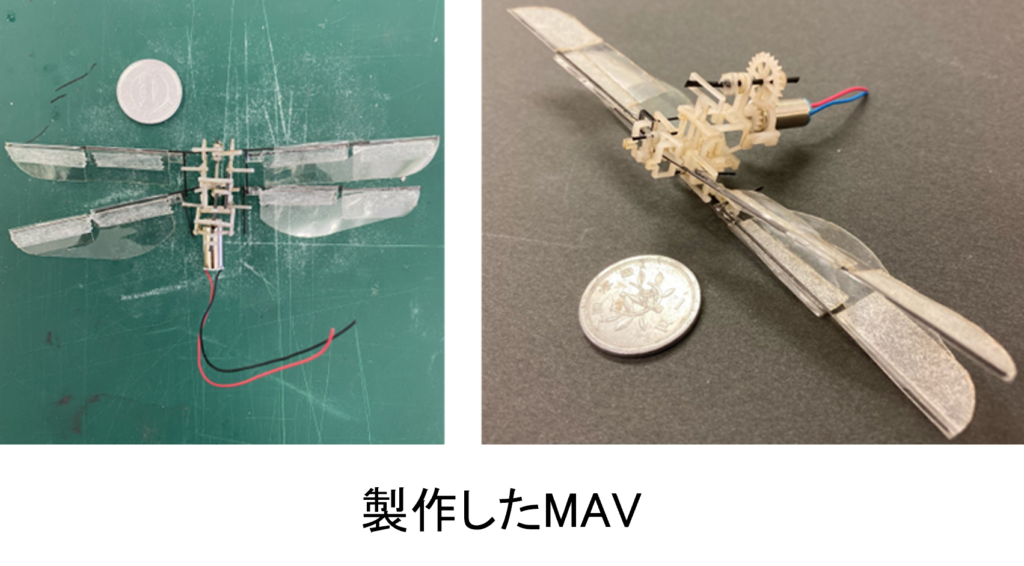
あらかじめ作成した図面データをレーザーカッター本体に移し、レーザーパワーや照射回数等の加工条件を決めます。その後、MAVの素材となるPETフィルムやポリアセタールにレーザーを数回照射して、任意の形状で切り出し、各部品を製作しています。製作したMAVは上記の3種類の運動を再現することが可能であり、翼幅12.5 cm、重量3 g未満の非常に小型かつ軽量な機体となっています。

●参考文献
D. Troast,F. Suhling,H. Jinguji,G. Sahlén,J. Ware,“A GlobalPopulation Genetic Study of Pantala flavescens”,PLOS ONE,(2016-03)